StereoAdapter: Adapting Stereo Depth Estimation to
Underwater Scenes
ICRA 2026
[Paper] [Code] [Dataset] [Model]
TL;DR: StereoAdapter is a self-supervised adaptive model that allows robust underwater depth estimation.
ICRA 2026
[Paper] [Code] [Dataset] [Model]
TL;DR: StereoAdapter is a self-supervised adaptive model that allows robust underwater depth estimation.
We evaluate StereoAdapter on a BlueROV2 across three obstacle layouts and three motion trajectories.
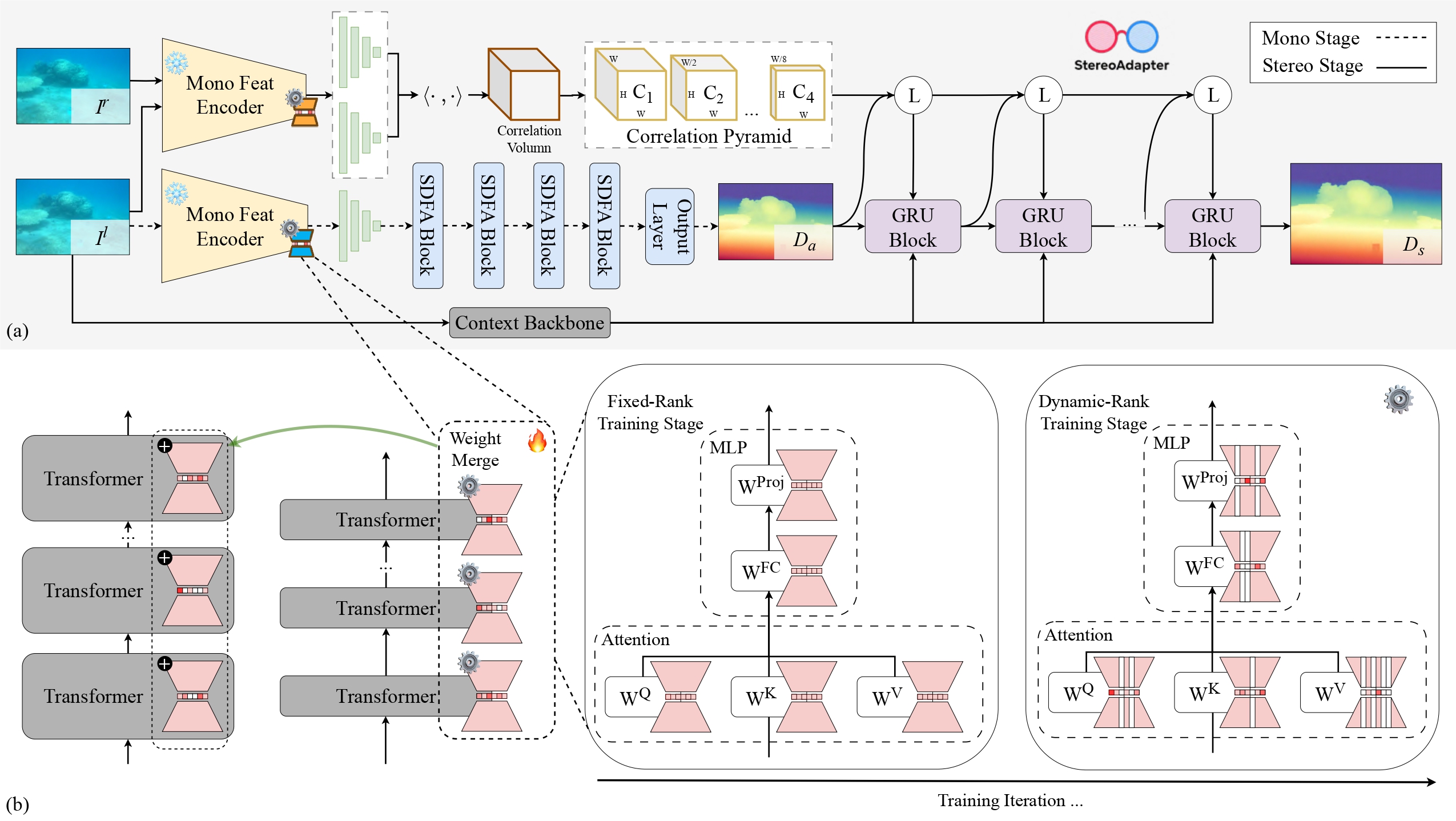
Detailed architecture of the StereoAdapter: (a) two-stage self-supervised training pipeline; (b) update mechanism with LoRA.
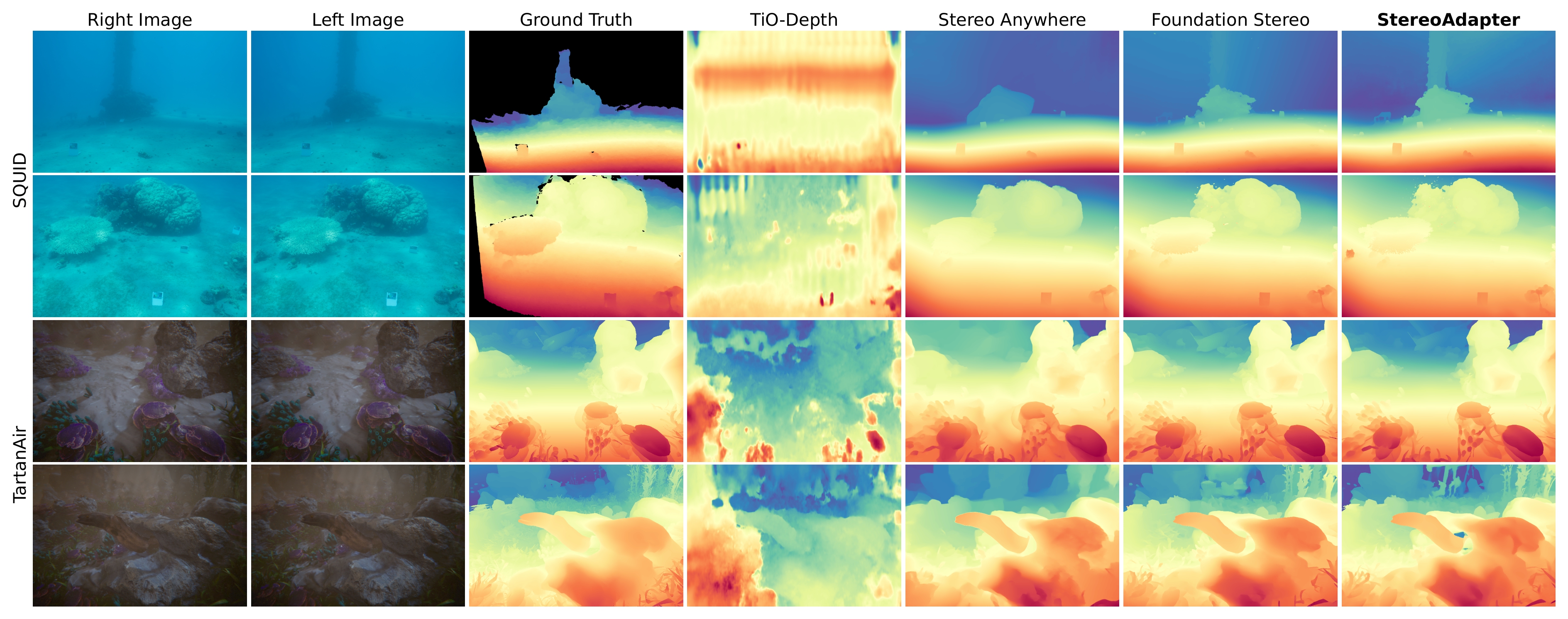
Visualization results of Stereo Depth Estimation Methods on SQUID and TartanAir.
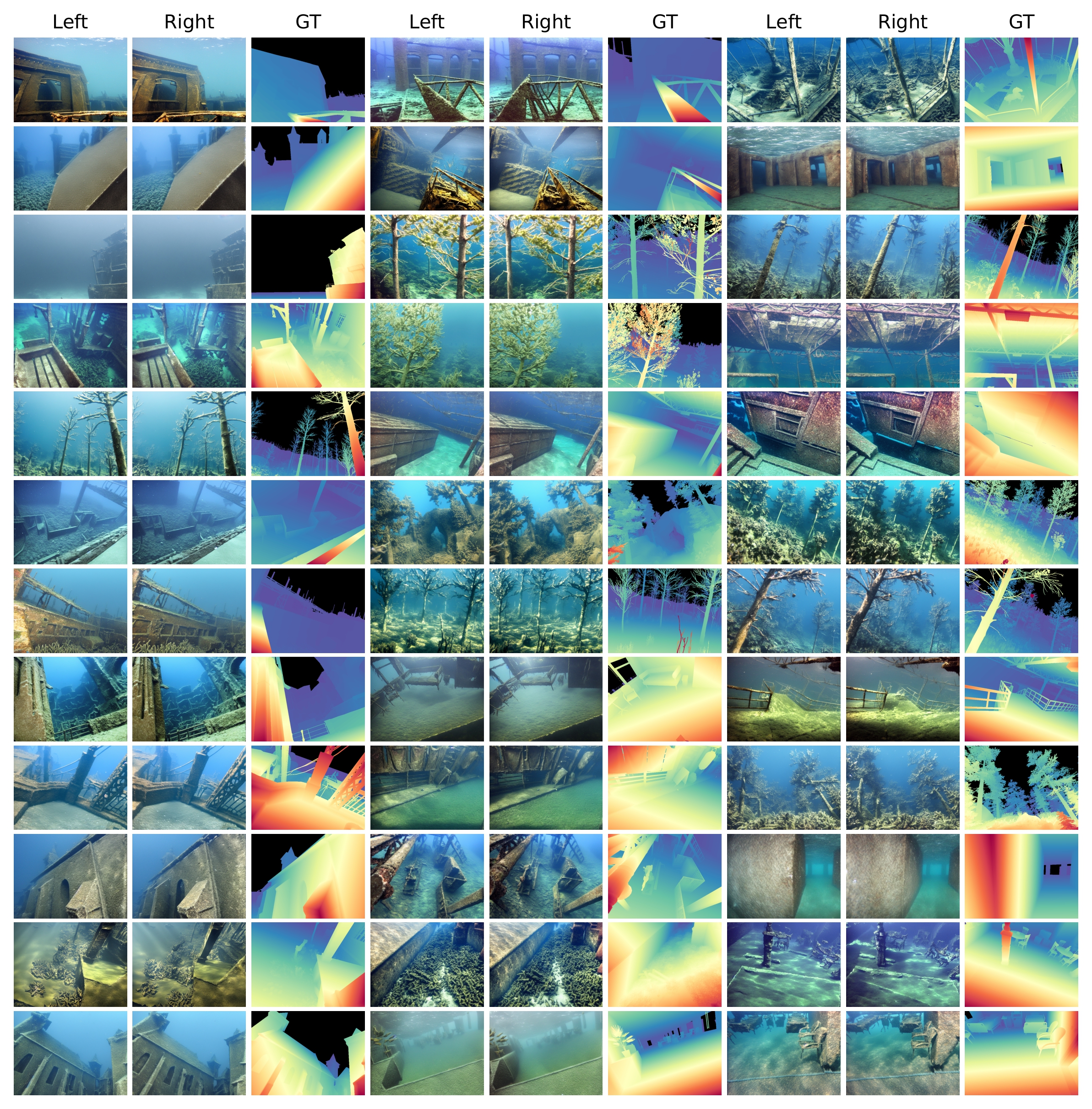
Example from the high-quality UW-StereoDepth-40K dataset.
StereoAdapter: Adapting Stereo Depth Estimation to Underwater Scenes